RIC-EU Annual Newsletter - June 2016
/It is with great pleasure that I announce the public availability of the latest edition of the RIC-EU newsletter. Many thanks to all contributors!

To submit content for publication on the ROS-I blog, please email matt.robinson <at> rosindustrial.org (North America) or opensourcerobotics@ipa.fraunhofer.de (Europe), or ros-i_asia@artc.a-star.edu.sg (Asia Pacific).
It is with great pleasure that I announce the public availability of the latest edition of the RIC-EU newsletter. Many thanks to all contributors!
We are happy to announce that Team Delft, a team of scientists and engineers from the TU Delft Robotics Institute and Delft Robotics, won the 2016 edition of the Amazon Picking Challenge which has just been held in Leipzig, Germany. The challenge, which you can read about here, aims to automate the "first and last miles of logistics". The task challenged robots to pick objects from containers and put them on shelves (the "stow task") and to pick objects from stocked shelves and put them into containers (the "pick task"). The variety of the objects and the unstructured environment still make this a considerably difficult task.


More information is available on RoboValley's announcement of the victory. Stay tuned for more in-depth posts going over the technical details of this ROS-Industrial success story!
This post features Part 2 of our March RIC-Americas Meeting Recap. Click here to read Part 1, which is about the demonstration day.
In March, more than 50 attendees from 32 organizations attended the RIC-Americas annual meeting. During the meeting, we learned about progress during the past year, and heard from speakers including Morgan Quigley (OSRF), RIC-EU Program Manager Bordignon (Fraunhofer IPA), Nicholas Yeo Chang Yee (ARTC), and Erik Nieves (fmr. Yaskawa and now PlusOne Robotics).
Attendees of the RIC-Americas Meeting.
Quigley provided an update on the progress of ROS 2.0 and presented the latest data on the performance of the real time capabilities, which includes improved performance of micro second level dither, even with some network congestion.
Bordignon inspired the audience with his presentation of the philosophy and progress of ROS software usage for industrial robotics in Europe, including a number of deployed or productized applications.
Yee shared a look into the modern and flourishing R&D capabilities for remanufacturing at ARTC, which is part of A*STAR in Singapore, and presented ARTC’s vision to launch RIC-Asia Pacific.
Nieves kept us guessing with a riveting story of his personal journey to embrace ROS as a representative of a major robot OEM, and then his venture into the world of supervised autonomy with his startup company PlusOne Robotics.
The attendees broke into four groups for roadmapping activities in a round robin fashion on four topics: motion planning, ease of use, hardware interfaces/interoperability, and ROS core. Five upcoming Focused Technical Projects (FTP):
The meeting generated momentum for the coming international expansion. Thanks to our members for your support and collaboration, and a special thanks to the emerging RIC-Asia Pacific for joining us.
Click the image to download the PDF document
The ROS Qt Creator Plug-in is developed specifically for ROS to increase a developers' efficiency by simplifying tasks and creating a centralized location for ROS tools. Since it is built on top of the Qt Creator platform, users have access to all of its existing features like: syntax highlighting, editors (C++ , Python, etc.), code completion, version control (Git, Subversion, etc.), debuggers (GDB, CDB, LLDB, etc.), and much more.
The ROS Qt Creator Plug-in provides the following capabilities:
Check out two videos (below). The first (left) is a short overview of the Qt Creator and its default capabilities. The second video (right) is an overview of the ROS Qt Creator Plug-in developed by Levi Armstrong from Southwest Research Institute. It concludes with an invitation for other to begin using the plug-in for ROS development.
The European edition of RoboBusiness is growing and quickly becoming an interesting event for "all things robotics" in Europe, from innovative research to new products. Following ROS-Industrial's participation at last year's edition, we had a strong presence at the event which took place June 1-3 in Odense, Denmark.
As RIC-EU Program Manager I presented "ROS-Industrial: bringing open-source robotics innovation to the factory floor". In the same track, Prof. Martijn Wisse from TU Delft, scientific advisor to RIC-EU, spoke about "Increasing the application of robotics and automation in EU". Together we conveyed the concept of using the ROS-Industrial platform as 1) a technology enabler to cross the "valley of death", i.e., the gap between the level of technical maturity at which academic research can bring robot technology and the level required to start its industrial application and commercialization; and 2) an open-source accelerator for the development of advanced robotic applications. As the platform evolves and incorporates new features, it can become for robotics something akin to what Android is for smartphones, that is, a very powerful technology enabler. ROS and ROS-Industrial are now on the radar of most actors in the robotics arena, so ROS(-I)'s maturation into the de-facto standard open-source software platform for robotics is well underway.

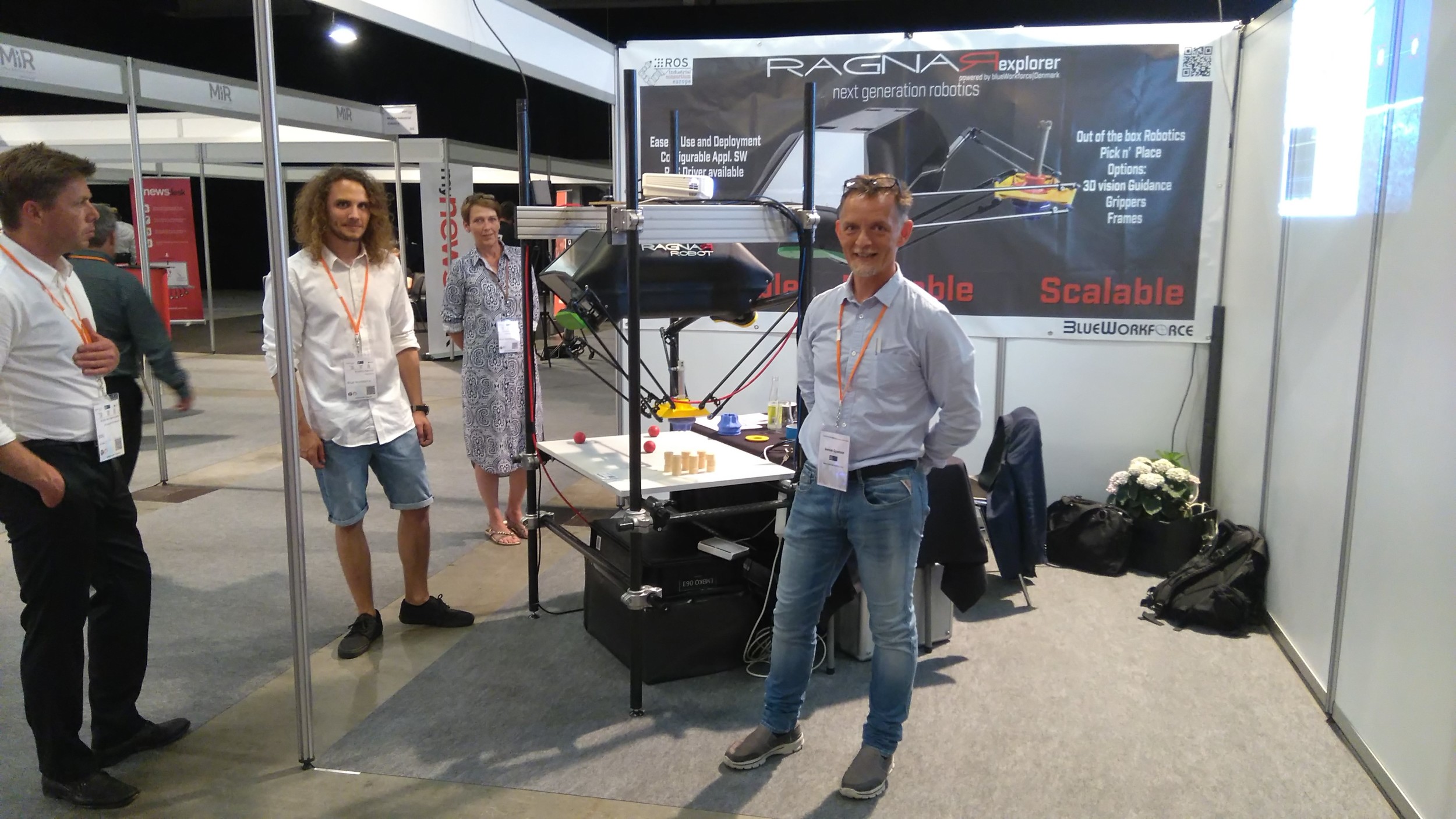

ROS-Industrial was also well represented at the exhibition. RIC-EU member BlueWorkforce showcased its Ragnar robot and platform, while Team Delft demonstrated their ROS-I powered entry to the 2016 Amazon Picking Challenge, which has just four weeks to go until the competition takes place in Leipzig, Germany. Best of luck, Team Delft!
It is remarkable that Henrik Christensen, professor at Georgia Tech and director of the Institute for Robotics and Intelligent Machines, mentioned ROS-Industrial as a noteworthy initiative which he praised as an effort towards much-needed standardization of robotics software. Such standardization is a necessary prerequisite to enable more and more advanced applications of robotics technology.
See you at RoboBusiness Europe 2017, April 20-21 in Delft, the Netherlands!
On April 19-20 Fraunhofer IPA hosted an event organized in collaboration with euRobotics AISBL on the best practices and legal aspects of Open-Source Software (OSS) in robotics and automation. The rationale behind the event was that while OSS is an established and accepted factor in "software-heavy" business domains like enterprise IT systems and smartphones, its inner workings are less understood in industries where software in now shifting from a component with ancillary role to one with high added-value. With the changes poised to happen in industrial robotics and automation by the advances in robotics science on one hand (just think of the progress in autonomous driving and its underpinning achievements in perception, planning, control) and by government-mandated initiatives like Industrie4.0 on the other, the ROS-Industrial team believes that OSS is a great opportunity to accelerate this process. However, to foster its adoption we understandably need to identify and clear also non-technical obstacles such as possible legal, economic and regulatory aspects.

During the event the speakers described to the audience how OSS is already part of established business practices at large companies in the industrial domain; how digital economies are being shaped thanks also to OSS; which regulatory and legal aspects we need to take into account in terms of safety standards, licensing and compliance processes.



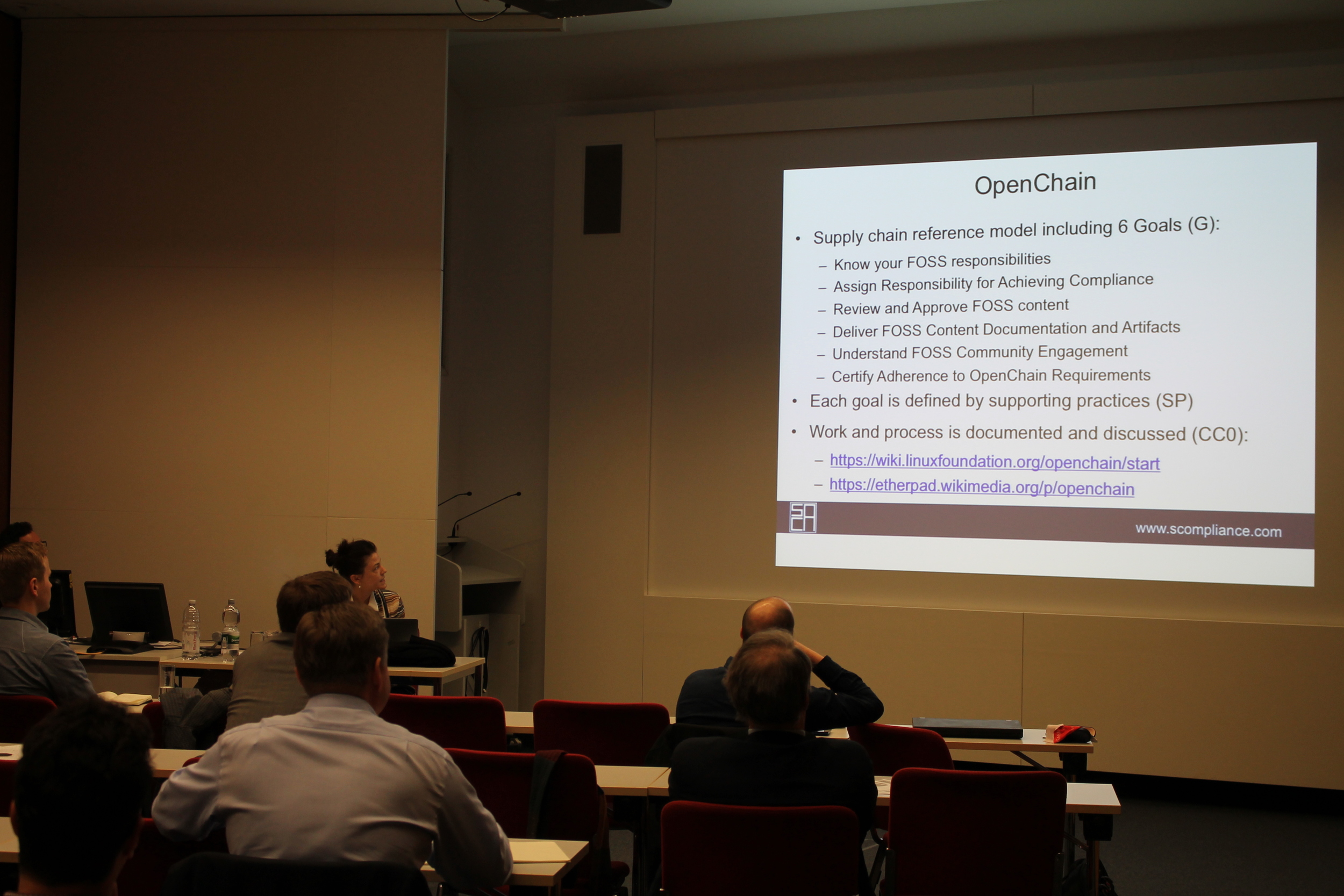
Takeaway messages that we want to highlight as they are instrumental in removing unfounded but long-standing critiques of OSS for industrial robots and machinery are:
Given the interest and the feedback collected after the event, we plan on following-up on these topics at the ROS-Industrial Conference next fall, whose program will be made available in the coming weeks.
Last week I had the pleasure of attending OSCon held in Austin, TX. OSCon has been around since 1999 and is a great conference for all things open source. More information on the conference can be found here. Overall the conference was educational and extremely motivational. I intend to regularly attend OSCon and I would recommend it to my colleagues in the open source robotics community. Below are things I learned from OSCon
Click on the image to view the full newsletter
Save the date for these upcoming events! For more details, refer to the events page.
Submitted by Saroya Whatley and Shawn Schaerer, Modbot
At Modbot, we make science fiction a reality by creating modular robotic parts that are easily snapped together to create a variety of robotic configurations servicing many different applications. By developing a system of modular joints and links that can be mass produced, Modbot is able to deliver industrial quality motion control at prices accessible by both larger manufacturing firms as well as makers and startups. The Modbot platform also includes a pendant software that can be accessed via the cloud or locally on a computer or tablet (Windows, OS X, iOS, Android). The software allows the user to not only program a Modbot robot with the touch of a button, but also simulate various robotic configurations in the virtual robot builder and build custom graphical user interfaces. The Modbot platform puts the power and precision of high-end machinery into an easy-to-assemble, simple to understand package.
Modbot Alpha Robot Demo at Hannover Messe 2016 (Photo: Shawn Schaerer)
The ROS-Industrial Consortium has been a valuable resource and feedback engine with regards to the development of Modbot's modular robotics system. As a member of the Consortium, Modbot works closely with the Consortium to use, develop and promote ROS Industrial. Currently, Modbot is working with the Consortium to release the CAD to ROS URDF Editor application.
Team Delft has qualified as one of the 16 finalist teams for the Amazon Picking Challenge 2016. The team is a joint effort of the startup Delft Robotics (Kanter van Deurzen a.o.) and TU Delft Robotics Institute (Carlos Hernandez Corbato a.o.), supported by the RoboValley initiative (www.robovalley.com)
The goal of the Amazon challenge is “to strengthen the ties between the industrial and academic robotic communities and promote shared and open solutions to some of the big problems in unstructured automation." In order to spur the advancement of these fundamental technologies, there will be two parallel competitions: the Pick Task, and the Stow Task. For the Pick Task, target items for an Amazon order have to be removed from a standard shelf in Amazon warehouses and placed into a tote. The Stow Task requires the reverse: target items have to be taken from a tote and stowed into the bins of the shelf. These tasks involve challenges in object recognition, grasping, dexterous manipulation, and motion planning.
Since January, Team Delft has been developing an industrial grade robotic system for the challenge. It involves a 7 degree-of-freedom Motoman robot mounted on a rail, courtesy of Yaskawa (sponsor). Ensenso cameras from sponsor Imagining Development Systems will feed high quality 3D images to a vision pipeline for object recognition and localization using Deep Learning techniques. The team is fully committed to the ROS-Industrial initiative. ROS and ROS-Industrial components for motion planning, robot control, grasping, and PointCloud processing will be integrated into a fault-tolerant control architecture for the robot.
Application video of Team Delft to qualify as finalists for the Amazon Picking Challenge.
The Amazon Picking Challenge will be held in conjunction with RoboCup 2016 in Leipzig, Germany from June 30 to July 3, 2016.
Follow Team Delft at: @teamdelft_apc
For more information about the Amazon Picking Challenge, please visit http://amazonpickingchallenge.org/
Submission courtesy of William Harrison, NIST
This is a short update for those who have interest in participating in the International Agile Robotics for Industrial Automation Competition (ARIAC). Here are some things you should be aware of:
If you are interested in Speaking at our workshop there are still spots available. Speakers who make it to CASE, will have the option of being listed as cosponsors of the competition. If you would like to speak or be involved in some other way please contact us.
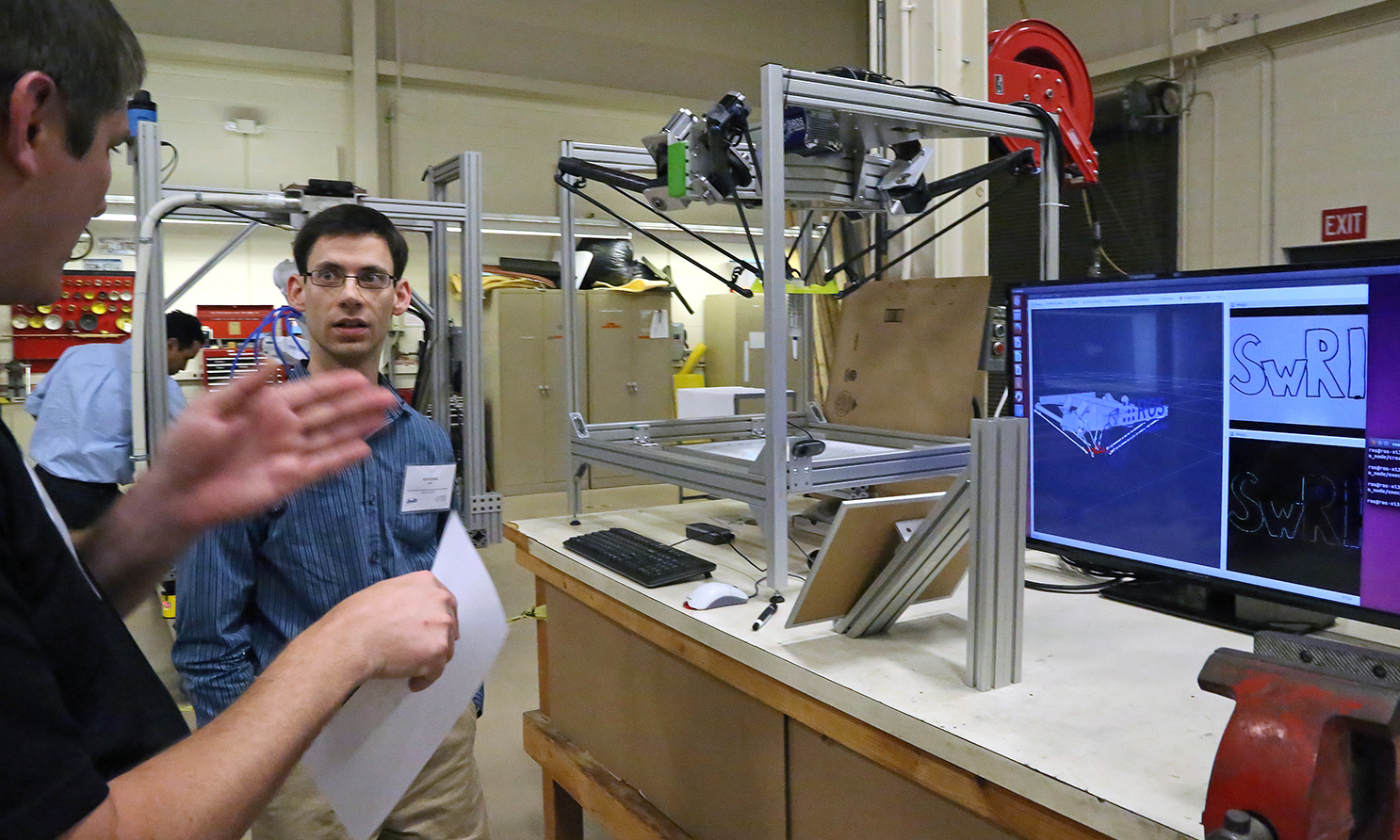
Spring ROS-Industrial Basic Developers Training classes gave participants an opportunity to learn new skills through hands-on training. The ROS-Industrial Developers’ Training Class was held April 6 - 8, 2016 at SwRI, in San Antonio, Texas where the ROS-I Consortium Americas is based.
On April 6 the class reviewed ROS packages, parameters, topics, messages, launch files and URDF's. The first day ended with a tour of a SwRI labs and campus where the participants were able to see several ROS applications as well as get a better idea of Southwest Research Institute facilities. The rest of training took developers through foundational robot manipulation (with an introduction to Descartes and other path planners) and perception with a multi-option lab day. The lessons can be found here. Participants from 3M, ABB, Bastian, IDEXX, John Deere, JR Automation, Smart Robotics (Japan) and one student from the Make School attended. Check out the pictures (below).
Many thanks for Jonathan Meyer, Levi Armstrong, Shaun Edwards, and Christina Gomez from SwRI for this year's training.
students independently walking through an online exercise while jonathan clarifies a point
all students bring their own laptops with a virtual machine that is set up and ready to go; levi approaches a student with a question
The full class with Swri ROS-Industrial support staff included
The ROS-I Industrial Calibration Library is the result of an internally funded SwRI project and has the following capabilities:
Check out two recent videos (below). The first is a short overview of the Industrial Calibration Library. It concludes with an invitation for others to use the library for their applications. Our second video is an example use case of extrinsic calibration between a robot and a David sensor, courtesy of Victor Lamoine from Institut Maupertuis. Let us know how you are using the Industrial Calibration Library!
As the technical value of Open-Source Software (OSS) is gaining acceptance in Industrial Robotics and Automation, our daily interaction with the key stakeholders operating in this field (OEMs, system integrators, startups, end users) has made us realize that the limiting factor to its further diffusion lies elsewhere. If Linux is a widely used and respected choice in IT, what is preventing open-source robotics frameworks to becoming accepted to the same extent in our field?
In our experience, current concerns are mostly centered around:
To help answer these questions and to support potential adopters of OSS in their decision process, Fraunhofer IPA and euRobotics AISBL is offering an event on April 19-20 in Stuttgart, Germany featuring selected speakers providing insight from the technical, economic and legal domains. It is a one-of-a-kind chance to get a comprehensive overview of these aspects and, even more importantly, get answers to your questions and voice your concerns.
For more information, including a detailed program and registration info, please refer to the following webpage.
I look forward to welcoming you in Stuttgart!
Your RIC-EU Program Manager,
Mirko Bordignon
We are excited to post our 50th ROS-I video: Robotic Product Singulation Testbed. This project was demonstrated during the Annual Meeting and is a collaborative development between ABB and SwRI to create a commercial product for warehouse automation. It highlights that, with some optimization, ROS-I applications can exhibit fast cycle times, without sacrificing the intelligence afforded by ROS. A scale demonstration of this technology will be on display next week at MODEX 2016, booth MA 957 (Baldor/ABB).
Note: Part 2 of the RIC-Americas Recap will cover events that occurred on March 4.
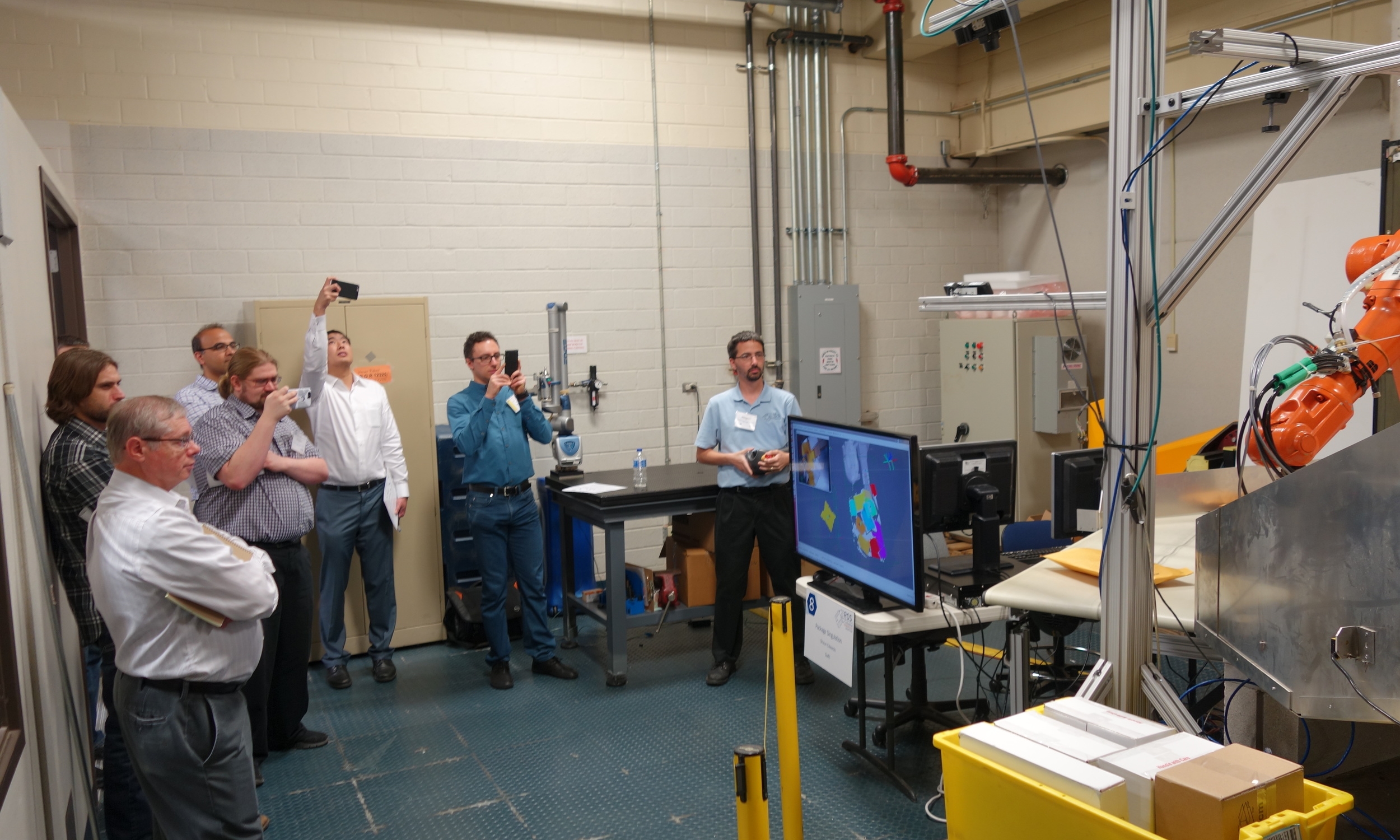
The ROS-Industrial Consortium Americas annual meeting was held March 3-4 at SwRI's headquarters in San Antonio, TX. March 3 events included an introduction to SwRI, 16 lab demonstrations, a keynote presentation about the ways that ROS is adding intelligence to a five-story tall mobile robotic aircraft depainting system, and an introduction to the ROS-Industrial Consortium. More than 50 people attended representing a cross section of ROS-Industrial stakeholders including automation equipment OEMs, end users, researchers, and government. During the demonstrations, the noise of numerous discussions gave the event a palpable buzz. While still relatively young, we heard a number of attendees remark that ROS-Industrial has momentum.
ROS/ROS-I Demonstrations:
Presentations:
Scan-N-Plan for On-The-Fly Robotic Blending Demonstration workcell.
Explaining the Robotic Blending Process.
Blue Workforce Ragnar pick and place demonstration.
Ragnar 2D vision/Replication Demonstration.
Dual arm Mobile Manipulation.
Package Singulation.
Intrinsic calibration.
Thunder Motion Planner.
FlexGUI Demonstration.
FLEXGUI runs from any web Browser, even a smart phone!
Discussion about the STOMP Motion Planner.
Close up of the sTOMP Planner.
Human-Centered Teleoperation for High Precision Tasks: Note the voice and gesture interface.
Another view of the Teleoperation Demo.
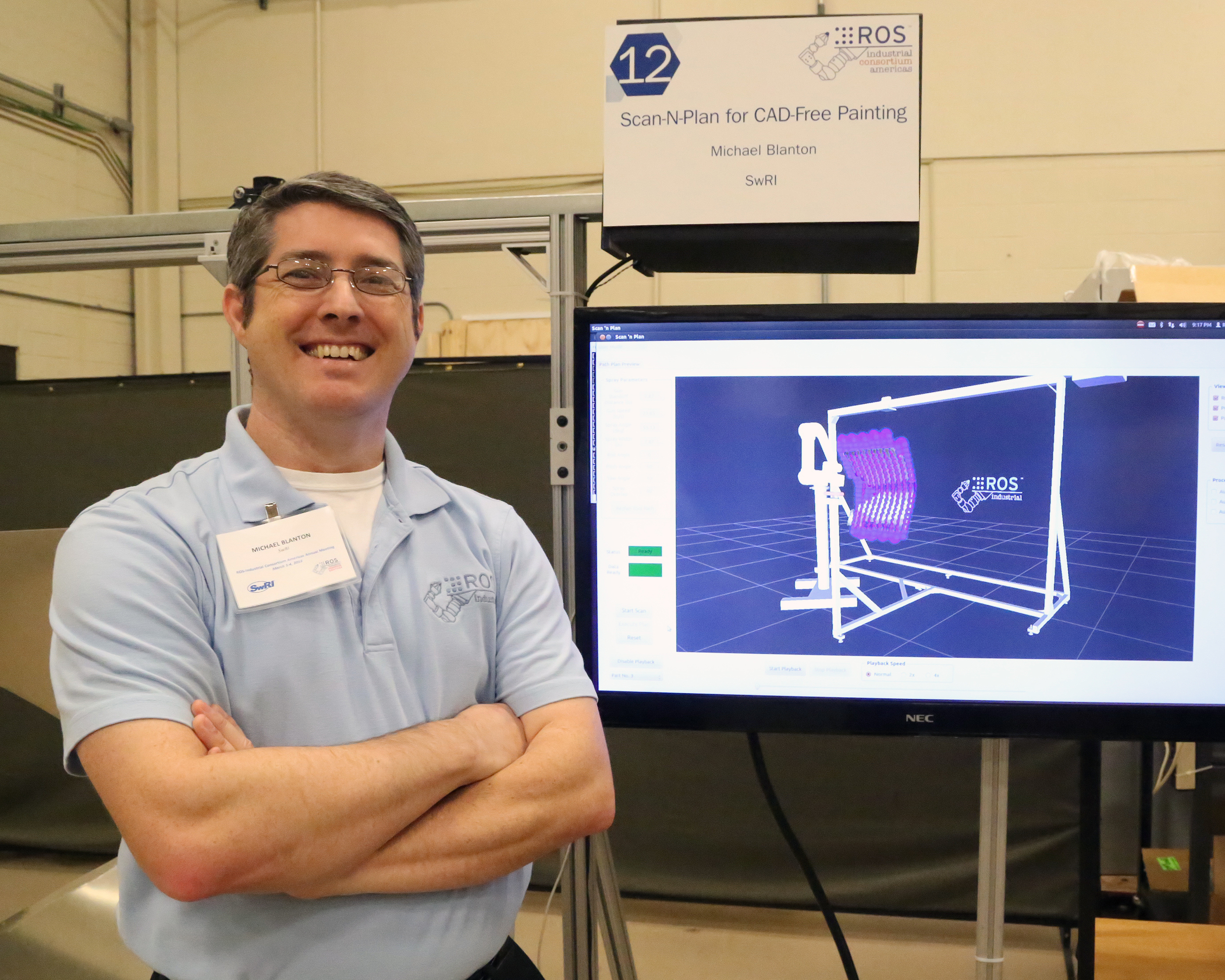
Scan-N-Plan for CAD-Free Painting.
Euler Mobile manipulator Demonstration.
Participants took turns riding in SwRI's ROS-enabled autonomous vehicles.
One vehicle navigated a slalom course while the other drove over a mix of paved and off-road Terrain.