ROS-Industrial is an open-source project that extends the advanced capabilities of ROS software to industrial relevant hardware and applications.
You can check out the software repositories over at GitHub for both community & partner developed and Consortium developed.
The mission of the Consortium is to accelerate the development of ROS-Industrial by:
Managing a roadmap to identify and prioritize ROS-Industrial capabilities for industrial robotics and automation as defined by the user community to address its current and future applications problems.
Instituting and enforcing code quality standards appropriate for an industrial software product. These include rating/tracking code quality metrics, multi-level testing and documentation.
Providing a wide range of user services, including technical support and training, to facilitate the continued adoption of ROS-Industrial by industry.
Interested in learning more about or even joining the ROS-Industrial Consortium? Start over at the Consortium FAQ, or you can find the respective region agreements below "Consortium" in the banner above!
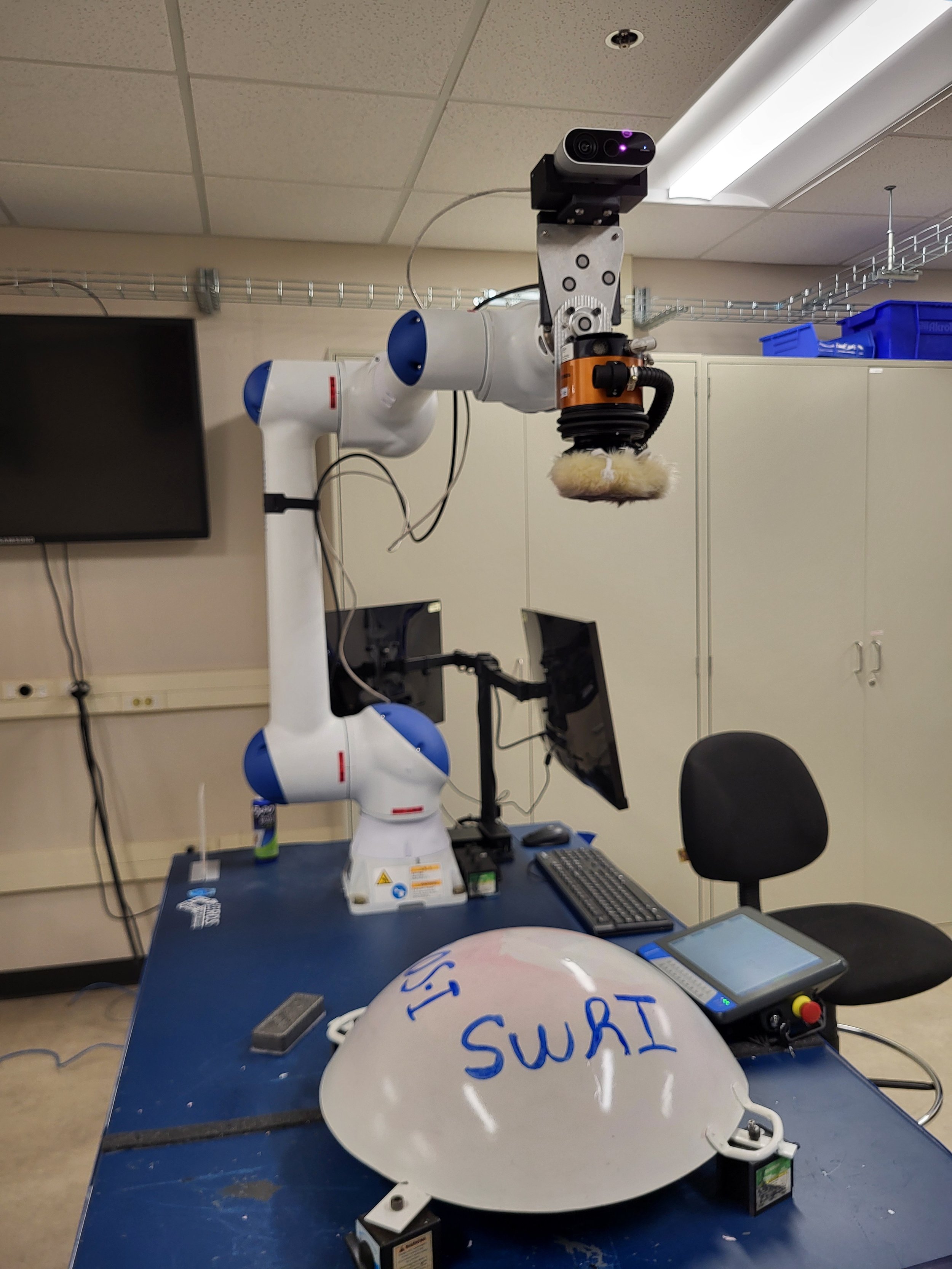
Robotic Blending Milestone 5, championed by Steel Founders’ Society of America, resulted in numerous capability enhancements and refinements to scan_n_plan_workshop and showcased open source delivering value on the foundry floor.
The ROS-Industrial open source project is now over 10 years strong! In honor of this milestone we reached out to the community to share some of the great applications they are building for industry with open source and ROS and of course ROS 2. Thanks to all those that contributed and making ROS-Industrial the place to start relative to open source for industry!
Ros-industrial had the opportunity to collaborate with Microsoft and BMW to address a burning need for agile and flexible logistics automation solutions that can interoperate efficiently and be deployed at scale. We hope you find this a compelling example of open-source delivering end user value and how researchers and for-profits can work together to solve big problems!
Highlights from Robotic Blending M4 FTP Technology Demonstration hosted by Wolf Robotics.
The ROS-I project is supported by the ROS-I Consortium
Featured News